Our values
Our international team continuously develops drag&bot to meet the high demands of our customers. In doing so, we act according to the following values:

Customer orientation
We do EVERYTHING to ensure that our customers are satisfied with our services and products. We actively ask for feedback. Positive feedback from our customers defines our success.

Willingness to perform
We encourage and demand a high level of motivation. We want everyone to pitch in and get started ("doer mentality").

Spirit of innovation
New ideas are important to us. If we decide to tackle new ideas, we offer the necessary freedom & support to implement them. Possible mistakes are allowed and tolerated.

Team spirit
With us, the team is more important than each individual. We work together, celebrate together, help each other and have fun at work.

Responsibility
We work independently and are responsible for the successful, timely implementation of our tasks. Hurdles and challenges spur us on.

Quality
Our products and services meet the highest requirements of the processing industry. Through our quality assurance and testing, we ensure that our products are free from defects.
"It's great to see how my idea at Fraunhofer over 10 years ago has become a successful company today. At drag&bot, I mainly take care of sales and the successful realisation of projects together with our customers."

"At drag&bot, I am primarily responsible for our product strategy and its technical implementation. My daily tasks include managing and organising our development team with agile scrum."

"At drag&bot, I take care of our product strategy and technical implementation. Working in our young, motivated team is fun every day."

"In addition to my wide range of tasks within the business processes at drag&bot, I am particularly focussed on the good cooperation with our parent company KEBA."

"I mostly work on hardware-related software development. As a team we have a lot of fun and I really like that everyone help each other like friends.“

"I work every day to ensure that our users have the best user experience. At drag&bot I appreciate the flexibility and hands-on way of working."

"Working in an interdisciplinary team on a complex software stack like drag&bot gives me many opportunities to grow. I really enjoy is always willing to help and co-create.“

History

2023
First joint product with KEBA
Together with our parent company KEBA, we have launched a first joint product where the drag&bot software for simplified robot programming is available as an integral part of the Kemro X platform. The integration of our software into the Kemro X platform offers machine builders in particular the opportunity to offer robotics integration and have changes easily implemented by end customers, regardless of robot brands and types.

2022
Successful EXIT: Takeover by KEBA
In order to push the international marketing of drag&bot even further, the founders and investors decide to sell their shares in drag and bot GmbH to KEBA from Linz. KEBA Industrial Automation is one of the leading solution providers for automation technology in the field of mechanical and plant engineering. With the help of its international sales network, drag&bot will be used even more in other parts of the world in the future. At the same time, together with KEBA, we will drive forward even more powerful and intelligent control systems and innovative operating concepts for machines and robots.

2021
Nachi partnership and integration
We now support all Nachi robots in the MZ series. The MZ series (1 kg - 25 kg) is a comprehensive range of universal, flexible industrial robots with an impressive price-performance ratio. They feature a compact and slim design with a long reach. High path speeds make them extremely productive. Their high repeatability enables precise handling and accurate positioning. MZ series robots with CFD controller can be controlled with drag&bot.

2021
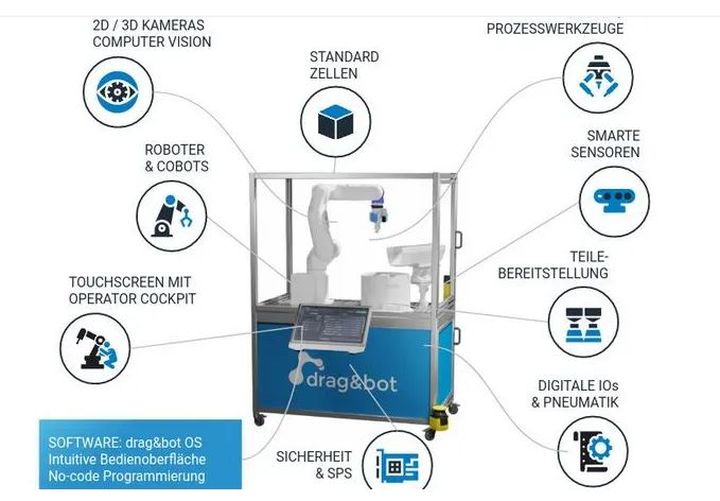
The drag&bot Robot Kit
The drag&bot software forms the basis of the Robot Kit. It is an automation construction kit from which manufacturing companies can configure a robot cell for their application.

2020
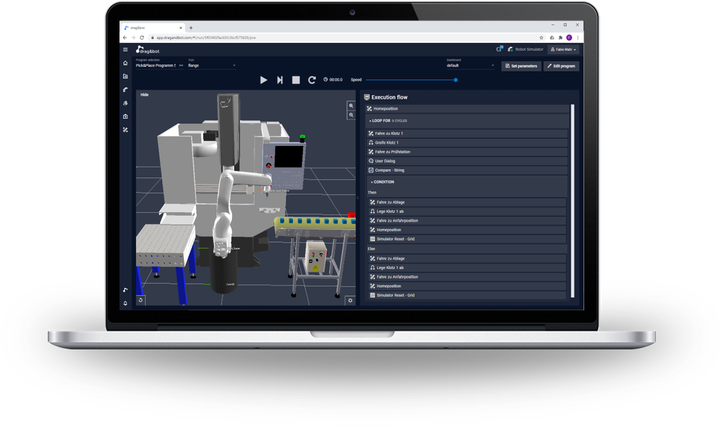
Release of the drag&bot Simulation
With the new drag&bot SIMULATION, manufacturing companies can now plan their automation solutions free of charge. Users can choose from a variety of robot models and also use their own CAD models of grippers and robot cells.

2020
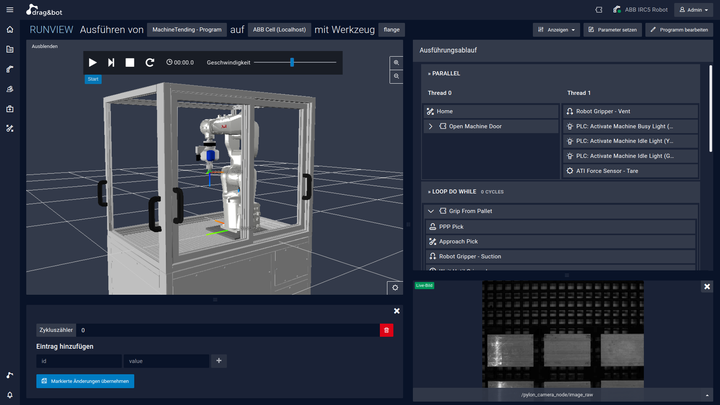
Integration of all common robot manufacturers
All common robot manufacturers as well as a variety of grippers and vision systems are now supported by the software. You can find an overview on our hardware pages.

2019
Own office
On 1 July 2019, the drag&bot team will move into its first independent office space in the Design Offices in Stuttgart's Fasanenhof district. The company now employs ten permanent staff.
2018
Financing through Speedinvest
In another round of financing, led by the Austrian VC "Speedinvest", drag&bot receives a seven-figure investment. The goal is to be the most widespread programming platform for industrial robots worldwide by 2025.
2018
Release of the 2D-Vision-Modul
The 2D Vision module is released. This offers hand/eye calibration for 2D cameras and enables image processing in OpenCV.

2017
GmbH foundation
In December 2017, Martin Naumann, Daniel Seebauer, Pablo Quilez and Witalij Siebert founded drag&bot GmbH.

2017
Research through EXIST Research Transfer
In March 2017, the German government's "EXIST Forschungstransfer" grant starts, releasing the four founders to work on the spin-off of drag&bot. At the same time, the founding team also changes: Witalij Siebert, who had already written his master's thesis in mechatronics at drag&bot, joins the spin-off.

2014
First demonstrator
After the topic of flexible automation became more and more relevant in Germany and Europe, Martin Naumann and Pablo Quilez present the first demonstrator for drag&bot at the Motek trade fair in Suttgart. Now the market is ready: the interest in drag&bot is so great that Martin and three other colleagues decide to found a spin-off of the Fraunhofer IPA. The founding team also consists of Pablo Quilez, a former research assistant at the Fraunhofer IPA; Daniel Seebauer, who previously worked at Siemens, and Saskia Tobias, who also researched the operation of industrial robots at the Fraunhofer IPA.

2008
First steps
As a research assistant at Fraunhofer IPA, Martin Naumann works on new ways to control and interact with industrial robots. Early on, he became enthusiastic about the idea of an intuitive, graphical interface for controlling robots. Despite the initially restrained feedback, Martin continues to push the idea of drag&bot in research projects.