Unsere Werte
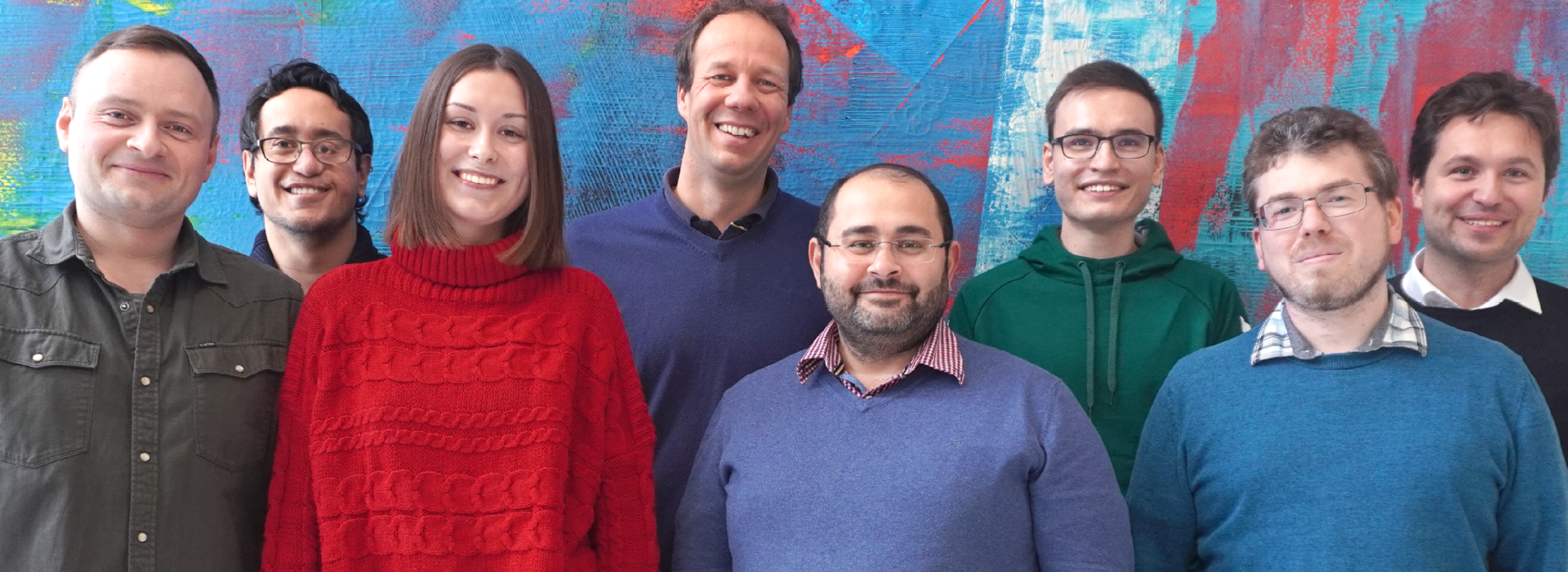
Unser internationales Team entwickelt drag&bot durchgehend weiter, um den hohen Anforderungen unserer Kunden gerecht zu werden. Dabei handeln wir nach folgenden Werten:

Kundenorientierung
Wir unternehmen ALLES, damit unsere Kunden zufrieden mit unseren Dienstleistungen und Produkten sind. Wir fragen aktiv nach Feedback. Positives Feeback unserer Kunden definieren unseren Erfolg.

Leistungsbereitschaft
Wir fördern und fordern eine hohe Leistungsbereitschaft. Bei uns soll jeder mit anpacken und von sich aus loslegen („Macher-Mentalität“).

Innovationsgeist
Neue Ideen sind uns wichtig. Wenn wir uns entscheiden, neue Ideen anzugehen, bieten wir die nötige Freiheit & Unterstützung diese umzusetzen. Mögliche Fehler sind erlaubt und werden toleriert.

Teamgeist
Bei uns ist das Team wichtiger als jeder Einzelne. Wir arbeiten zusammen, feiern gemeinsam, helfen uns gegenseitig und haben Spaß bei der Arbeit.

Verantwortung
Wir arbeiten selbstständig und sind eigenverantwortlich für die erfolgreiche, fristgerechte Umsetzung unserer Aufgaben. Hürden und Herausforderungen spornen uns an.

Qualität
Unsere Produkte und Dienstleistungen erfüllen die höchsten Anforderungen der verarbeitenden Industrie. Durch unsere Qualitäts-Sicherung und Tests stellen wir sicher, dass unsere Produkte frei von Fehlern sind.
„Es ist schön zu sehen, wie aus meiner Idee vor über 10 Jahren am Fraunhofer heute eine erfolgreiche Firma geworden ist. Bei drag&bot kümmere ich mich vor allem um den Vertrieb und die erfolgreiche Projektumsetzung zusammen mit unserem Kunden.“

„Bei drag&bot bin ich vor allem für unsere Produktstrategie und deren technische Umsetzung verantwortlich. Zu meinen täglichen Aufgaben gehören die Leitung und Organisation unseres Entwicklungsteam mit agile Scrum.“

„Bei drag&bot kümmere ich mich um unsere Produktstrategie und technische Umsetzung. In unserem jungen, motivierten Team macht die tägliche Arbeit Spaß."

„Neben meinem breiten Aufgabenfeld innerhalb der geschäftlichen Prozesse bei drag&bot liegt mir vor allem die gute Zusammenarbeit mit unserer Mutterfirma KEBA am Herzen.“

„Ich arbeite hauptsächlich an der Entwicklung von hardwarenaher Software. Im Team haben wir eine Menge Spaß und ich mag es sehr, dass sich alle gegenseitig wie Freunde unterstützen."

„Ich arbeite täglich daran, dass unsere Nutzer die beste User Experience erfahren. Bei drag&bot schätze ich die Flexibilität und hands-on Arbeitsweise.“

„Die Arbeit in einem interdisziplinären Team an einem komplexen Software-Stack wie drag&bot gibt mir viele Möglichkeiten zu wachsen. Ich genieße es immer sehr, gerne zu helfen und mitzugestalten."

Historie

2023
Erstes gemeinsames Produkt mit KEBA
Gemeinsam mit unserem Mutterunternehmen KEBA haben wir ein erstes gemeinsames Produkt auf den Markt gebracht, bei dem die drag&bot-Software zur vereinfachten Roboterprogrammierung als integraler Bestandteil der Kemro X Plattform verfügbar ist. Die Integration unsere Software in die Kemro X Plattform bietet insbesondere Maschinenbauern die Möglichkeit, Robotik-Integration anzubieten und Änderungen einfach von Endkunden umsetzen zu lassen, unabhängig von Robotermarken und -typen.

2022
Erfolgreicher EXIT: Übernahme durch KEBA
Um die internationale Vermarktung von drag&bot noch stärker voranzutreiben, entschließen sich die Gründer und Investoren, ihre Anteile an der drag and bot GmbH an die KEBA aus Linz zu verkaufen. Die KEBA Industrial Automation ist eine der führenden Lösunganbieter für Automatisierungstechnik im Bereich Maschinen- und Anlagenbau. Mit Hilfe ihres internationalen Vertriebsnetzwerks wird drag&bot in Zukunft auch in anderen Teilen der Welt noch stärker zum Einsatz kommen. Gleichzeit werden wir gemeinsam mit KEBA noch leistungsfähigere und intelligentere Steuerungssysteme und innovative Bedienkonzepte für Maschinen und Roboter vorantreiben.

2021
Nachi-Partnerschaft und -Integration
Wir unterstützen jetzt alle Nachi-Roboter der MZ-Serie. Die MZ-Serie (1 kg – 25 kg) ist eine umfassende Baureihe von universellen, flexibel einsetzbaren Industrie-Robotern mit einem beeindruckenden Preis-Leistungs-Verhältnis. Sie zeichnen sich durch ein kompaktes und schlankes Design mit einer großen Reichweite aus. Durch hohe Bahngeschwindigkeiten sind sie extrem produktiv. Ihre hohe Wiederholgenauigkeit ermöglicht präzises Handling und exaktes Positionieren. Roboter der MZ-Serie mit CFD Controller können mit drag&bot gesteuert werden.

2021
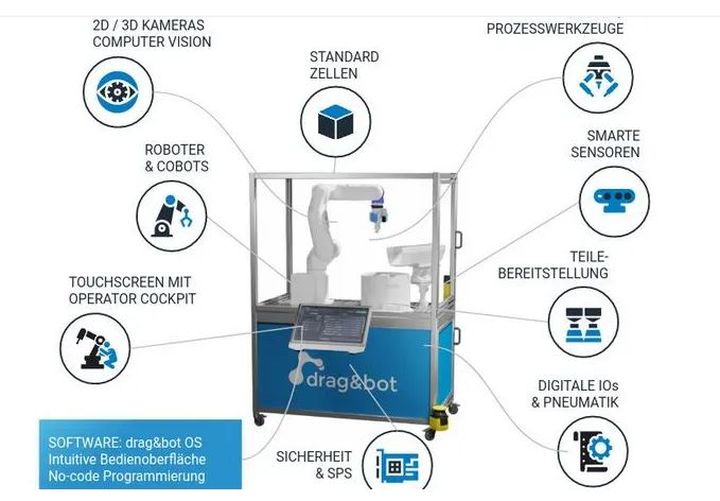
Das drag&bot Robot-Kit
Die drag&bot Software bildet die Basis des Robot-Kits. Es handelt sich hierbei um einen Automatisierungs-Baukasten, aus dem produzierende Unternehmen eine Roboterzelle für ihre Anwendung konfigurieren können.

2020
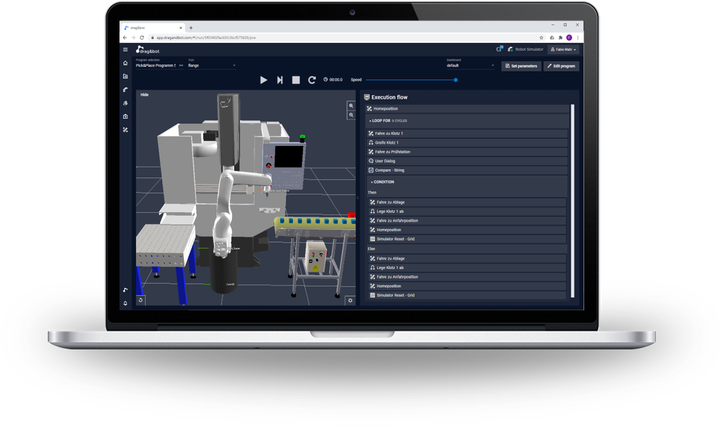
Release der drag&bot Simulation
Mit der neuen drag&bot SIMULATION können produzierende Unternehmen nun kostenlos ihre Automatisierungslösungen planen. Die Nutzer können dabei zwischen einer Vielzahl von Robotermodellen wählen und auch ihre eigenen CAD Modelle von Greifern und Roboterzellen nutzen.

2020
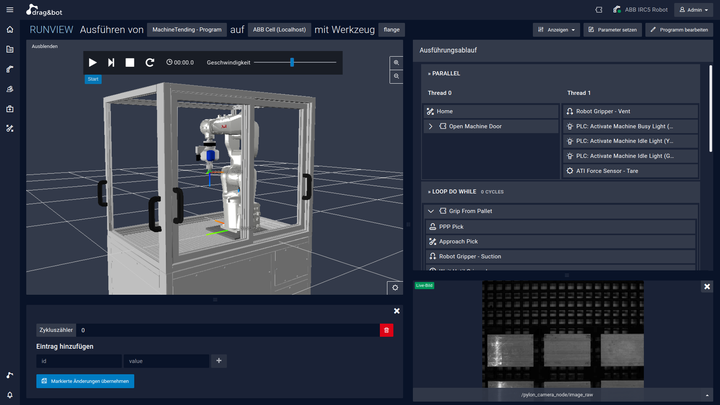
Einbindung aller gängigen Roboterhersteller
Alle gängigen Roboterhersteller sowie eine Vielzahl von Greifern und Vision Systemen werden nun von der Software unterstützt. Eine Übersicht finden Sie auf unseren Hardware Seiten.

2019
Eigenes Büro
Zum 01.07.2019 bezieht das drag&bot Team die ersten eigenständigen Büroflächen in den Design Offices im Stuttgarter Fasanenhof. Das Unternehmen beschäftigt mittlerweile zehn feste Mitarbeiter.
2018
Finanzierung durch Speedinvest
In einer weiteren Finanzierungsrunde, angeführt vom österreichischen VC „Speedinvest“, erhält drag&bot ein siebenstelliges Investment. Das Ziel ist es, bis 2025 die verbreitetste Programmierplattform für Industrieroboter weltweit zu sein.
2018
Release des 2D-Vision-Moduls
Das 2D-Vision-Modul wird releast. Dieses bietet eine Hand/Auge-Kalibrierung für 2D-Kameras und ermöglicht Bildverarbeitung in OpenCV.

2017
GmbH Gründung
Im Dezember 2017 erfolgt die Gründung der drag&bot GmbH durch Martin Naumann, Daniel Seebauer, Pablo Quilez und Witalij Siebert.

2017
Forschung durch EXIST Forschungstransfer
Im März 2017 startet das Stipendium der Bundesregierung „EXIST Forschungstransfer“, das die vier Gründer freistellt, an der Ausgründung von drag&bot zu arbeiten. Zur selben Zeit verändert sich auch das Gründerteam: Witalij Siebert, der bereits seine Masterarbeit im Bereich Mechatronik bei drag&bot geschrieben hatte, steigt in die Ausgründung mit ein.

2014
Erster Demonstrator
Nachdem das Thema flexible Automatisierung in Deutschland und Europa mehr und mehr an Relevanz gewann, stellen Martin Naumann und Pablo Quilez den ersten Demonstrator zu drag&bot auf der Motek Messe in Suttgart vor. Nun ist der Markt soweit: Das Interesse an drag&bot ist so groß, dass sich Martin mit drei weiteren Kollegen entscheidet, ein Spin-off des Fraunhofer IPA zu gründen. Das Gründerteam besteht außerdem aus Pablo Quilez, ehemaliger wissenschaftlicher Mitarbeiter am Fraunhofer IPA; Daniel Seebauer, der zuvor bei Siemens arbeitete sowie Saskia Tobias, die ebenfalls am Fraunhofer IPA zur Bedienung von Industrierobotern forschte.

2008
Erste Schritte
Als wissenschaftlicher Mitarbeiter bei Fraunhofer IPA arbeitet Martin Naumann an neuen Möglichkeiten zur Steuerung und Interaktion mit Industrierobotern. Schon früh begeistert ihn die Idee einer intutiven, graphischen Oberfläche zur Steuerung von Robotern. Trotz des anfänglich verhaltenen Feedbacks treibt Martin die Idee von drag&bot in Forschungsprojekten weiter voran.