


Funktions-Übersicht
In der untenstehenden Liste sind alle Funktionen verlinkt, sodass Sie mit einem Klick direkt dorthin gelangen.
Von der Simulation zur Produktion:
Component Manager Roboter-System konfigurieren
Robot Simulator Produktionsabläufe simulieren
Scenario Designer Die ganze Anlage in 3D
Builder Roboterprogramm erstellen
Operator Cockpit Produktion steuern und überwachen
Weitere Funktionen:
Operator Panel Das digitale Teach-Pendant
Wizards Funktionsblöcke parametrisieren
Custom Wizard Programm-Vorlagen
User Management Admin, Technician, Operator
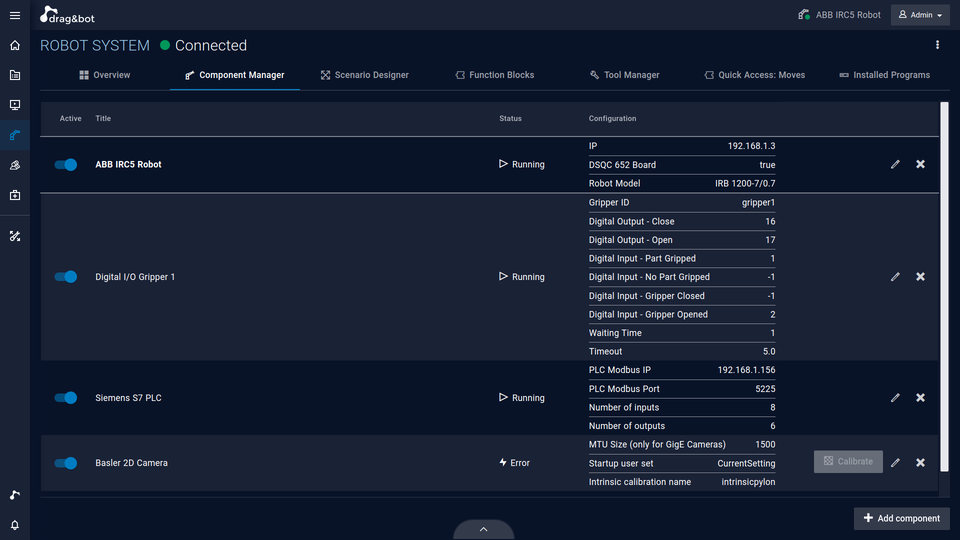
1. Component Manager
Roboter-System konfigurieren
Im Komponenten-Manager konfiguriert der Nutzer die verbundene Hardware. Die Installation der entsprechenden Treiber zur Hardware erfolgt vollautomatisch im Hintergrund. Anschließend können die gewünschten Funktionsbausteine für die entsprechende Hardware geladen werden. Für bestimmte Hardware ist außerdem eine Konfiguration zur Kommunikation mit drag&bot notwendig.
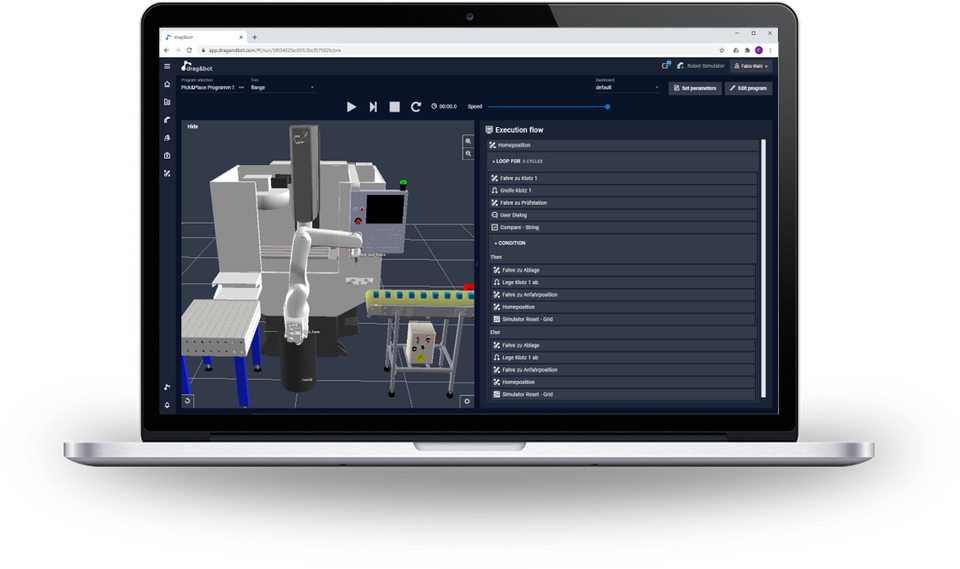
2. Robot Simulator
Produktionsabläufe simulieren
Der simulierte Roboter in drag&bot kann mit einem beliebigen Roboterarm (verschiedene Hersteller und Größen verfügbar) genutzt werden. Damit können Anwender den zu automatisierenden Prozess schnell und unkompliziert simulieren, ohne physische Hardware zu benötigen. Das Ergebnis kann als Entscheidungsgrundlage für die Automatisierung in puncto technische Machbarkeit (z. B. Erreichbarkeiten und grobe Taktzeitabschätzungen) dienen.

3. Scenario Designer
Die ganze Anlage in 3D
In der 3D-Umgebung des Scenario Designers können Nutzer eigene CAD-Modelle importieren und diese mit 3D-Modellen von Robotern, Greifern und Zellenkonstruktionen kombinieren. Der Scenario Designer ermöglicht es, die Größe, Position und Orientierung der Objekte zu verändern und digitale Abbildung der Anlage zu erstellen. Anschließend kann das Szenario zur späteren Wiederverwendung abgespeichert werden. Für den einfachen Einstieg in diese Funktion stehen bereits konfigurierte Szenarien zur freien Bearbeitung zur Verfügung.
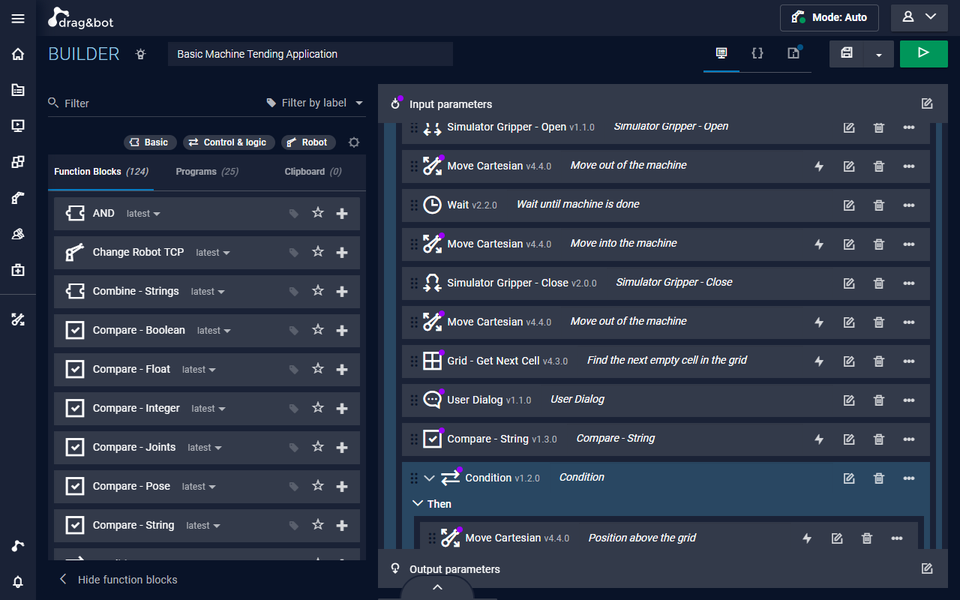
4. Builder
Roboterprogramm erstellen
Im drag&bot Builder können per drag & drop Applikationen aus vordefinierten Funktionsblöcken erstellt werden. drag&bot enthält bereits alle für gängige Roboterapplikationen nötigen Funktionsblöcke, z.B.:
-
Roboter bewegen
-
Greifer öffnen und schließen
-
I/Os setzen und lesen
-
Palettieren
-
Schleifen, Verzweigungen, parallele Ausführung
-
Warten, Programm abbrechen, …
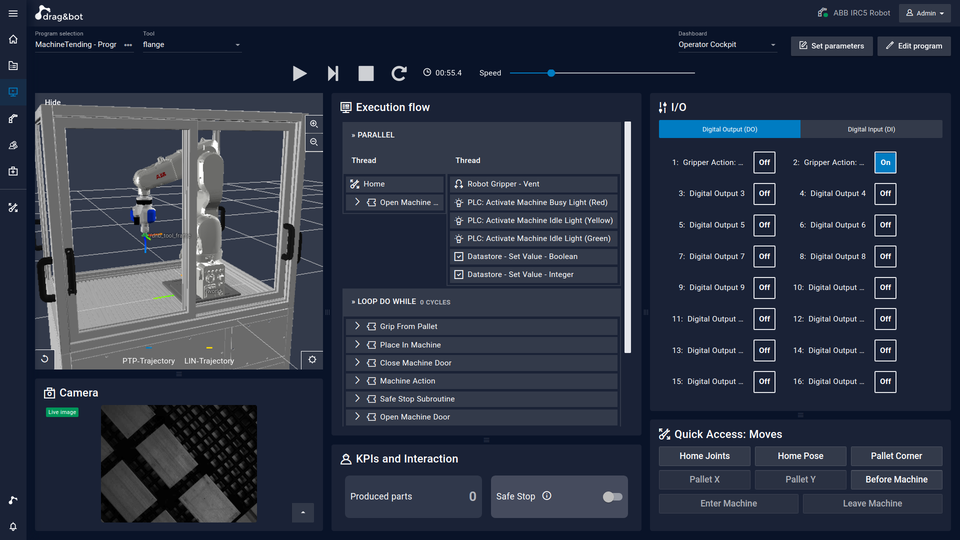
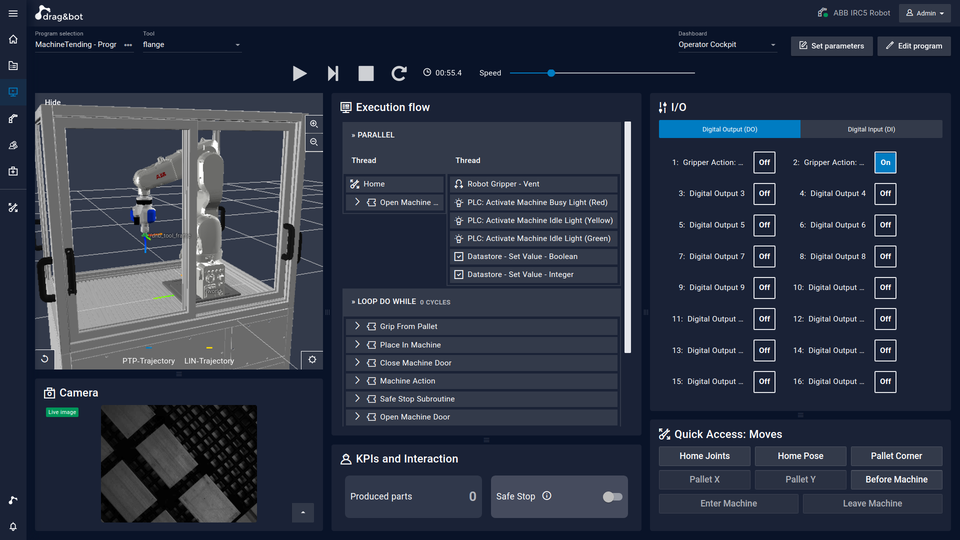
5. Operator Cockpit
Produktion steuern und überwachen
Mit dem Operator Cockpit werden Programme ausgeführt und überwacht. Das frei konfigurierbare HMI kann an die Anforderungen der Anwendung und des Bedieners angepasst werden. Inhalte des Cockpits können zum Beispiel Live-Kamera-Bilder, Raster-Verwaltungen, Sensordaten, Produktionsdaten oder Interaktionsflächen sein. Auch für Einrichter oder Instandhalter bietet das Cockpit nützliche Funktionen: Mit einem Klick sind sie zurück im Builder und können die Anwendung erweitern und optimieren.
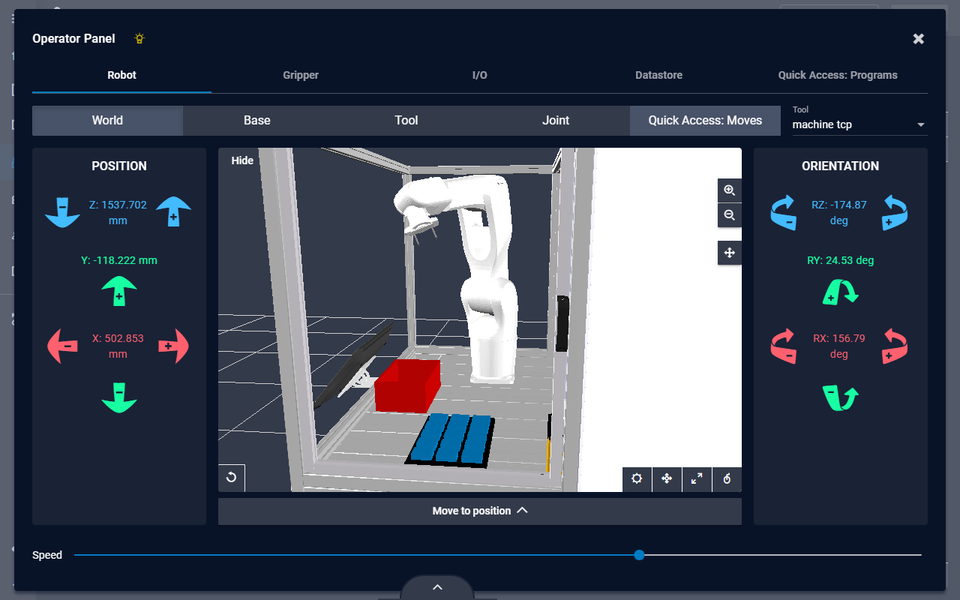
Operator Panel
Das digitale Teach-Pendant
Der Operator Panel ist die zentrale Steuereinheit für die Hardware-Komponenten eines Robotersystems.
Funktionen:
- Roboter verfahren
- Greifer ansteuern
- Digitale I/Os setzen und lesen
- Kamerabild optimieren
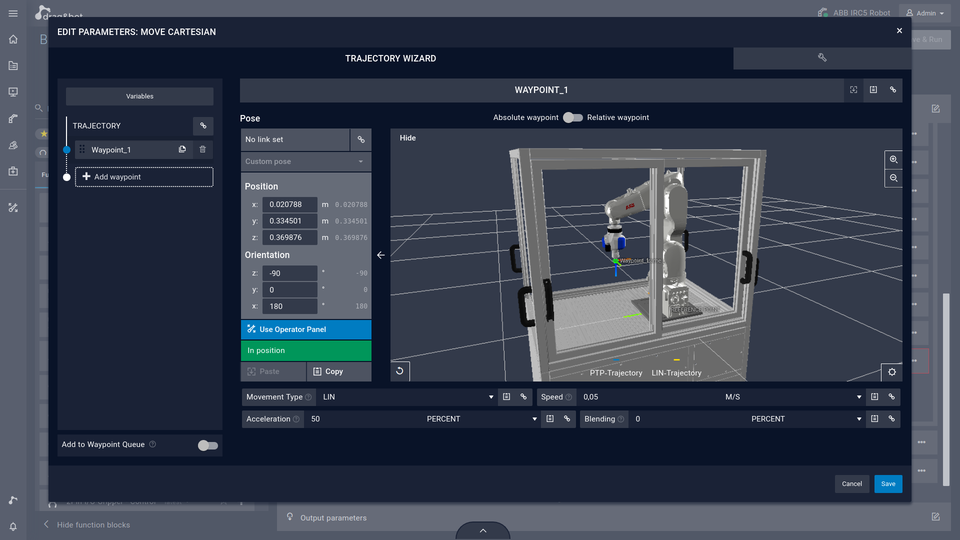
Wizards
Funktionsblöcke parametrisieren
Wizards sind grafische Bedien- und Eingabehilfen. Sie helfen, die für manche Funktionsblöcke notwendigen Einstellungen über eine graphische Benutzeroberfläche zu konfigurieren. Anwender können so ohne Expertenwissen Funktionsblöcke an die spezifischen Anforderungen ihrer Anwendung anpassen. Folgende Wizards sind Teil des drag&bot CORE:
Funktionen:
- Roboter bewegen und Positionen speichern - Roboterbahnen aus Einzelpositionen erstellen - Raster eines Magazins zur Teilentnahme-/ abfrage definieren - Fingerposition, Schließkraft und Schließ- geschwindigkeit von Greifern festlegen
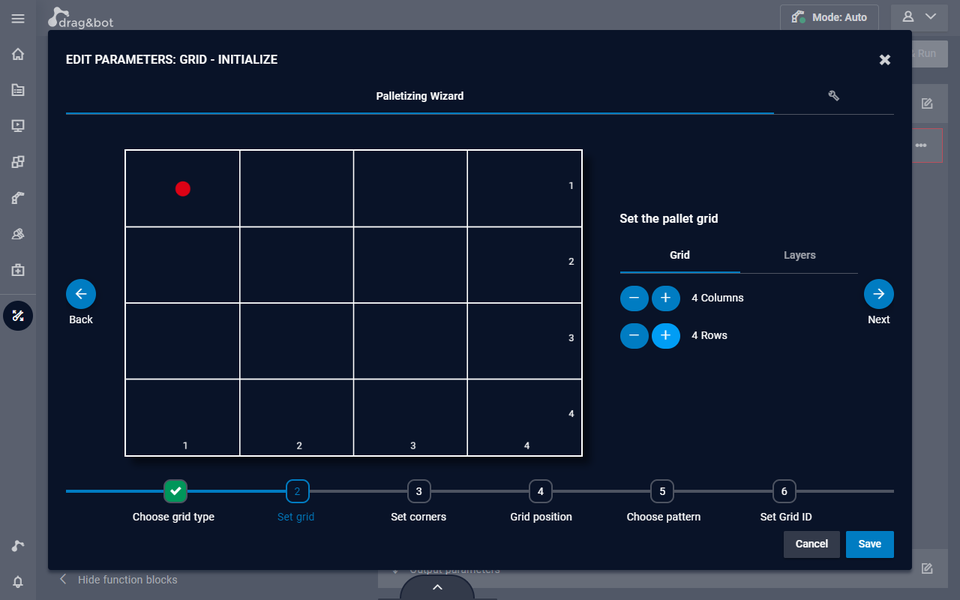
Custom Wizard
Programm-Vorlagen
Mit Hilfe der Custom Wizards wird der Nutzer Schritt für Schritt durch die Erstellung eines Programmablaufs für einen spezifischen Anwendungsfall geführt.
Beispiel Raster-Wizard:
Zu Beginn wird die grundlegende Rasterform gewählt, im Anschluss dann die Anzahl an Reihen und Spalten. Der Roboter muss an drei Ecken des Rasters bewegt werden, damit die Koordinaten des Rasters im Raum und die der einzelnen Felder bestimmt werden können. In den abschließenden Schritten werden die Programmlogik sowie Greifstrategien bestimmt. Das Ergebnis ist ein sofort ausführbares drag&bot-Programm.
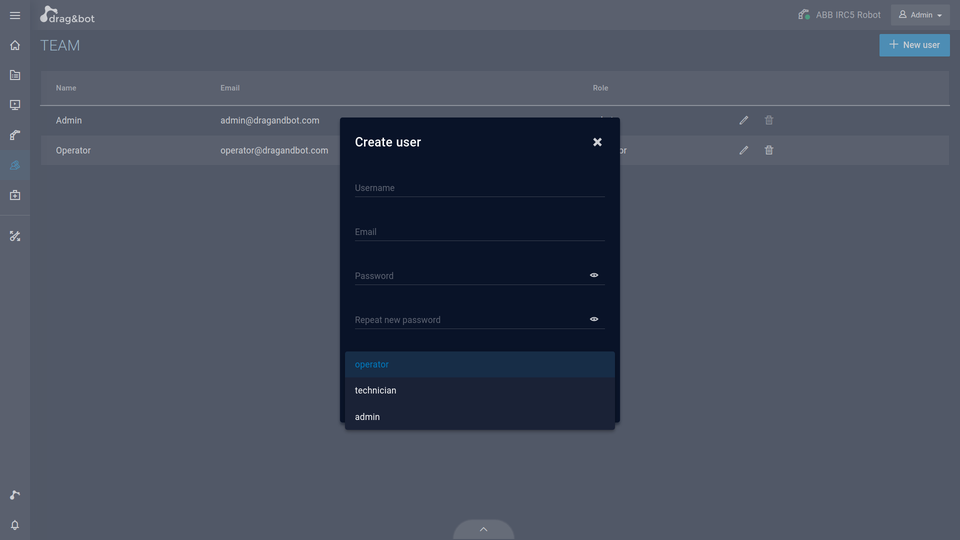
User Management
Admin, Technician, Operator
Die Funktionen, die einem Nutzer zur Verfügung stehen, hängen von der Rolle ab, die der Administrator an ihn vergeben hat. Der Administrator eines Systems kann Nutzer anlegen, ändern oder löschen. Die drei verfügbaren Rollen sind: Admin, Technician, Operator. Der Operator hat beispielsweise nur Zugriff auf ein für ihn konfiguriertes Operator Cockpit sowie freigegebene Programme.
drag&bot SIMULATION
Software selbst ausprobieren
drag&bot SIMULATION ist die Testversion von dra&bot OS, die vollständig in Ihrem Browser bzw. in der Cloud ohne echte Roboter-Hardware funktioniert. Melden Sie sich gleich an, um unsere Software kennenzulernen – und erhalten Sie direkt Ihre persönlichen Zugangsdaten per E-Mail, damit Sie sofort loslegen können.



Edge
Chrome
Safari
Firefox